Design A Matrix Of Translation With Homogeneous Coordinate System

Coordinate Transformations In Robotics Matlab Simulink Mathworks Benelux Coordinates Circuit Design Transformations
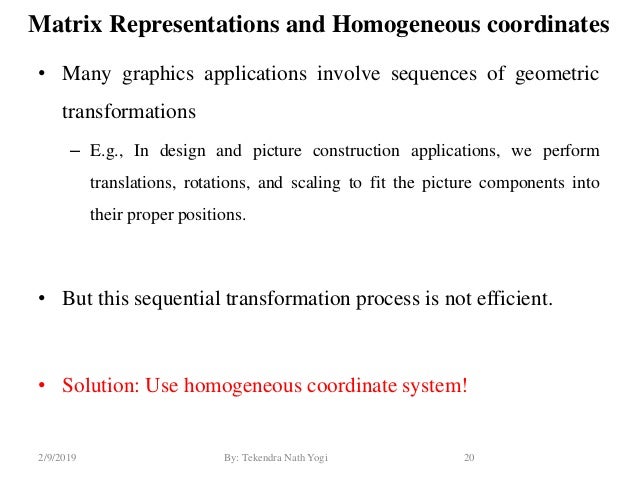
Computer Graphics Homogeneous Coordinates Javatpoint

Transformation Using Matrices Geometry Transformations Mathplanet

3d World To First Person Transformation Geometry Of Image Formation Coursera
Homogeneous Coordinates Mike On Matlab Graphics Matlab Simulink

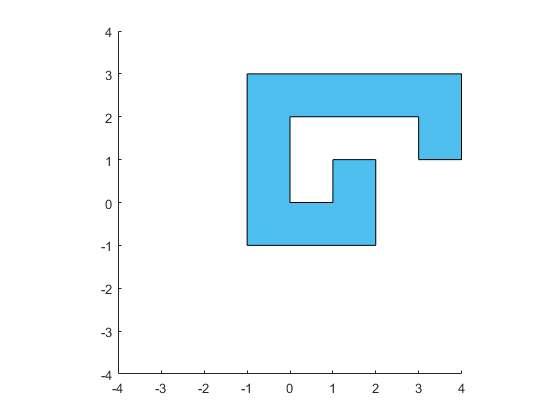
Points And Transformations
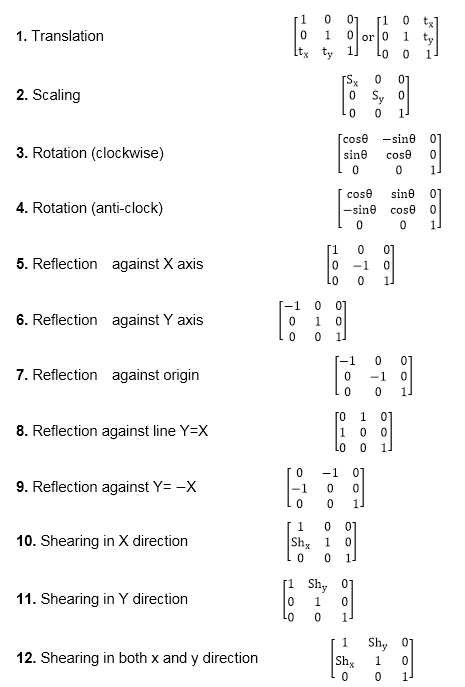
In this way we can represent the point by 3 numbers instead of 2 numbers which is called homogenous coordinate system.
Design a matrix of translation with homogeneous coordinate system.

Vector Graphics Three Dimensional Homogeneous Coordinates A First Course In Electrical And Computer Engineering Openstax Cnx

Pbr Textures To Maya Arnold Renderman Vray Redshift Workflow By Aeolian Yang Pbr Maya Texture
B Sc Csit Computer Graphics Unit 2 By Tekendra Nath Yogi

2 2 3 Coordinate Transformations In 2 D Robotics Programming Study Guide
Source : pinterest.com
